Hi, I'm Yash!
Hi, I'm Yash!
I am a robotics software engineer building innovative software solutions for drones and autonomous technologies.
I am a robotics software engineer building innovative software solutions for drones and autonomous technologies.
I am a robotics software engineer building innovative software solutions for drones and autonomous technologies.
Selected works
Selected works
Advancing Target Arm's TULAR: Software Development for Dynamic Launch and Recovery
As a Robotics Software Engineer at Target Arm Inc., I led software design, development, testing, and deployment across 3+ TULAR device production versions, focusing on improving functionality, scalability, and reliability with each iteration.
I developed software tools to accelerate deployment cycles and enable rapid hardware testing, while creating remote diagnostic tools for automatic fault detection and resolution, improving product reliability and ease of use.
Additionally, I managed a complex codebase and coordinated sprints, feature testing, code reviews, and the entire SDLC to facilitate smooth feature releases and timely issue resolution.
Tech Stack: C++, Rust, Python, ROS, Gazebo, Git, AWS, PX4, Ardupilot, MAVlink, GNSS/INS, OpenCV, Agile, CI/CD.

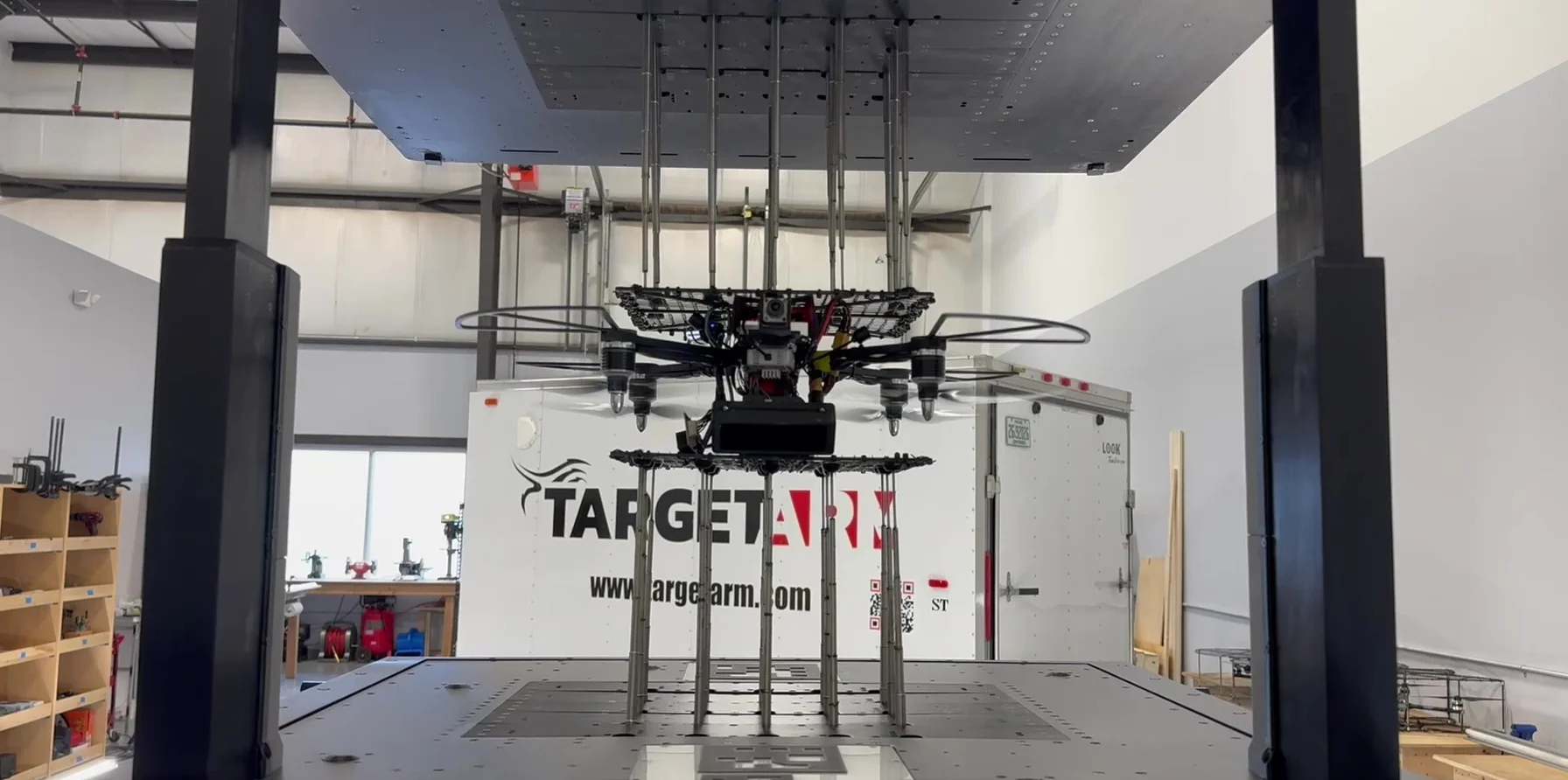

Transforming Drone Autonomy and Mission Capabilities for Target Arm
As a Robotics Software Engineer at Target Arm Inc., I integrated GNSS/INS, camera, and LiDAR on the drone platform to achieve <2 cm localization accuracy in both GPS and GPS-denied environments, increasing mission success rates by 50%.
I built software and communication architecture on embedded Linux to interface with new sensors, optimize data flow across modules, and improve synchronization between multi-robot systems, expanding device and drone capabilities.
Additionally, I created sensor integration and testing routines, focusing on controller tuning, functionality validation, and safety protocols to enhance product capabilities based on customer feedback.
Tech Stack: C++, Rust, Python, ROS, Gazebo, Git, AWS, PX4, Ardupilot, MAVlink, GNSS/INS, OpenCV, Agile, CI/CD.


Master's Project at WPI
2021-2022
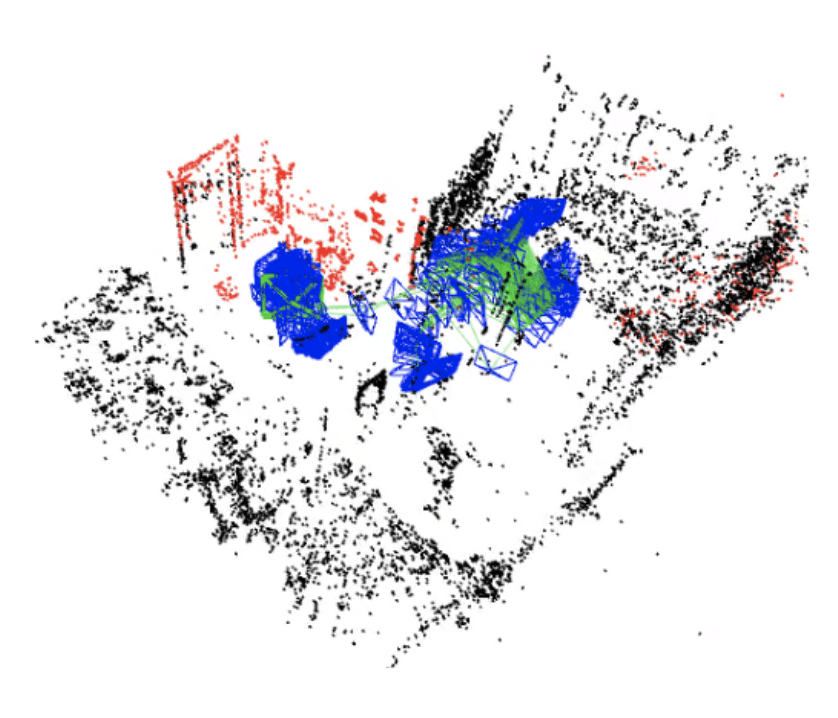
Mapping the Unknown: Decentralized Visual SLAM Using UAVs
In this team project, I contributed significantly to enhance the efficiency of mapping unknown environments using decentralized multi-agent systems, with a focus on disaster response and hazardous material handling. My primary role involved facilitating the convergence of robots at predefined locations to share mapping data, enabling real-time updates for first responders on personnel and room layouts.
I also conducted a comparative analysis that demonstrated how employing three robots significantly reduced mapping time compared to a single robot, highlighting the benefits of collaboration in complex scenarios. The overall solution was validated through simulations with TurtleBots in the ROS Gazebo environment, showcasing its effectiveness in real-world applications. This project illustrates the potential of advanced robotics to improve operational efficiency and situational awareness in critical situations.
Tech Stack: C++, Python, ROS, Gazebo, Git.

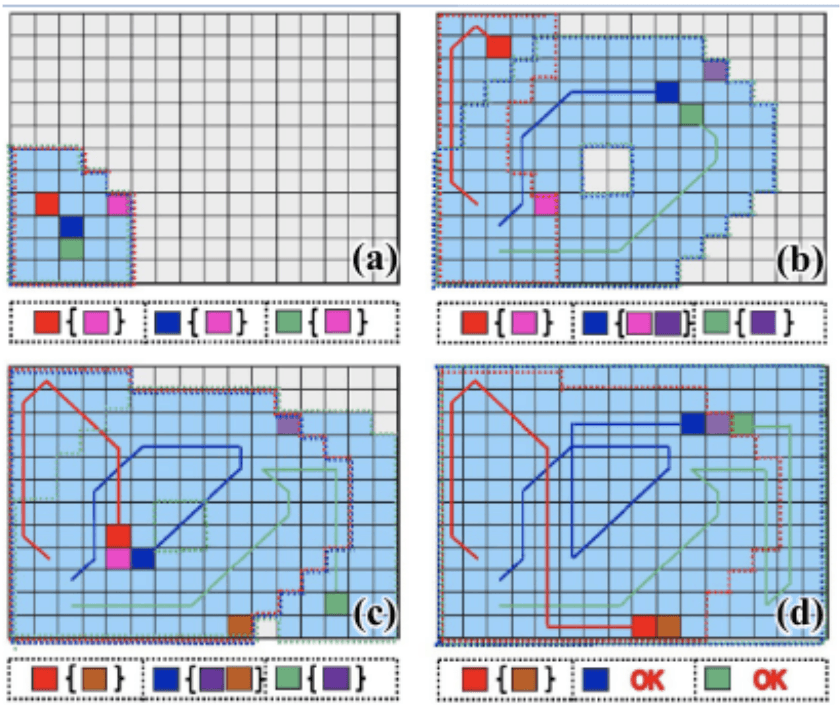
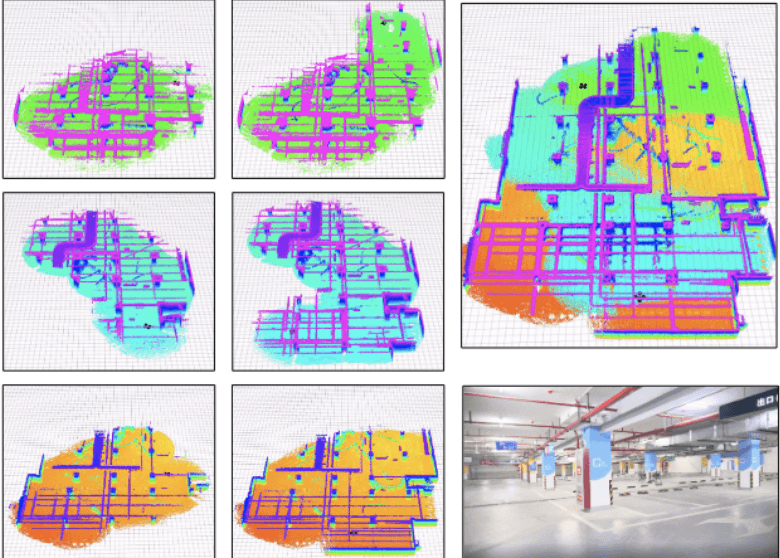
Image 2 and Image 3 Reference: [1] Gao, Y., Wang, Y., Zhong, X., Yang, T., Wang, M., Xu, Z., Wang, Y., Xu, C., & Gao, F. (2021). Meeting-Merging-Mission: A Multi-robot Coordinate Framework for Large-Scale Communication-Limited Exploration. ArXiv, abs/2109.07764.
Master's Project at WPI
2021
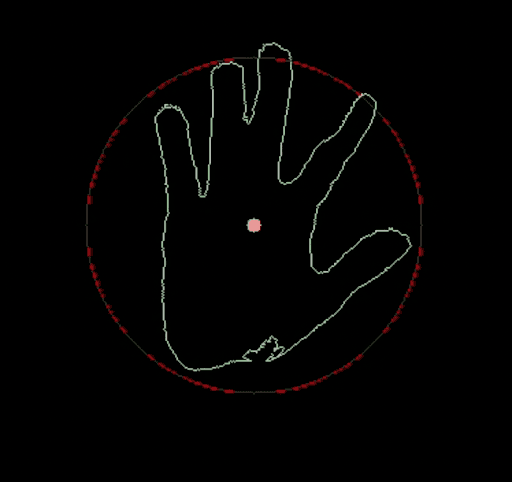
Real-Time Teleoperation of a 6-DOF Robotic Arm Using Vision-Based Hand Tracking in ROS
I developed a contactless teleoperation system for the 6-DOF Franka Emika Panda robotic arm, simulated in ROS Gazebo. The system allows intuitive control by tracking hand movements through a webcam, converting the hand's pose into commands for the robot. This solution is designed for hazardous environments, enabling tasks like "Pick and Place" without the need for traditional controllers. I utilized ROS, computer vision techniques like color thresholding and contour detection, and linear interpolation to map hand movements to the robot's workspace.
Tech Stack: ROS, Gazebo, OpenCV, C++, Git.

Master's Project at WPI
2021
Real-Time 3D Mapping and Localization with Depth Sensing
Developed a real-time 3D mapping and localization system using an Intel RealSense depth camera and advanced SLAM algorithms, including ORB-SLAM. Utilized point cloud data to generate detailed 3D maps, enabling precise spatial awareness in complex environments. Focused on achieving efficient processing to ensure accurate and responsive map updates in real-time, showcasing expertise in computer vision, point cloud processing, and depth-sensing technologies.
Tech Stack: ROS, Gazebo, OpenCV, C++, Git.


Bachelor's Thesis
2019
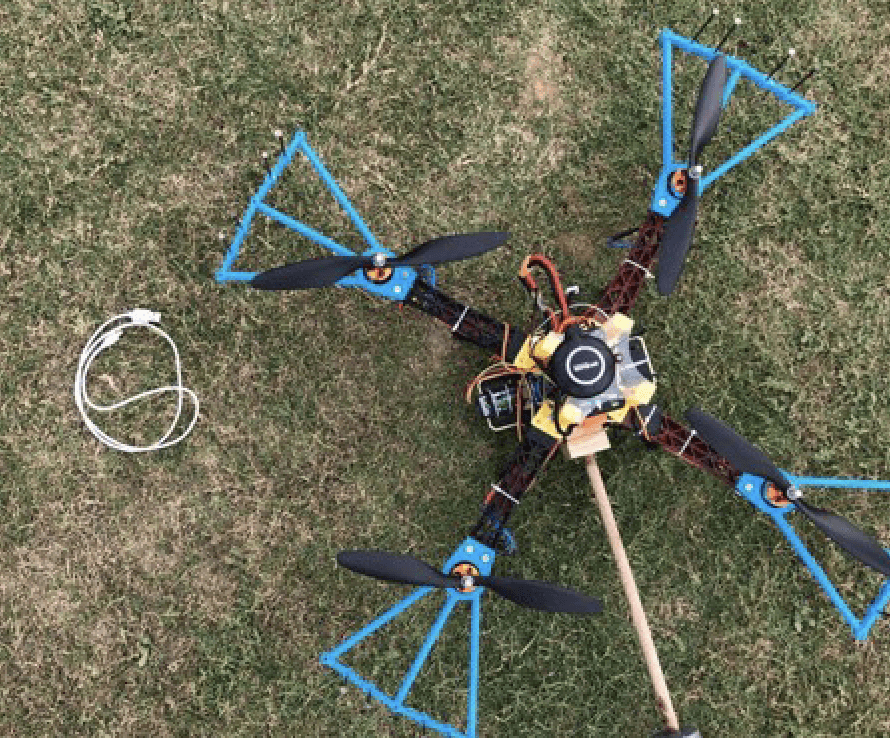
Vision-based Collision Avoidance System for a UAV
This project aimed to develop a vision-based collision avoidance system for UAVs. I designed a marker-based localization system using an RGB camera to track the UAV's position relative to surrounding obstacles.
By leveraging OpenCV for image processing on a Raspberry Pi, I employed Aruco markers to provide real-time position and orientation data for the quadcopter. This innovative approach enabled precise navigation away from obstacles, enhancing the UAV's operational capabilities and safety. Overall, the project demonstrates how computer vision can significantly boost UAV autonomy and reliability in dynamic environments.
Tech Stack: C++, OpenCV, Aruco marker, Arduopilot, MAVlink.
Advancing Target Arm's TULAR: Software Development for Dynamic Launch and Recovery
As a Robotics Software Engineer at Target Arm Inc., I led software design, development, testing, and deployment across 3+ TULAR device production versions, focusing on improving functionality, scalability, and reliability with each iteration.
I developed software tools to accelerate deployment cycles and enable rapid hardware testing, while creating remote diagnostic tools for automatic fault detection and resolution, improving product reliability and ease of use.
Additionally, I managed a complex codebase and coordinated sprints, feature testing, code reviews, and the entire SDLC to facilitate smooth feature releases and timely issue resolution.
Tech Stack: C++, Rust, Python, ROS, Gazebo, Git, AWS, PX4, Ardupilot, MAVlink, GNSS/INS, OpenCV, Agile, CI/CD.
Transforming Drone Autonomy and Mission Capabilities for Target Arm
As a Robotics Software Engineer at Target Arm Inc., I integrated GNSS/INS, camera, and LiDAR on the drone platform to achieve <2 cm localization accuracy in both GPS and GPS-denied environments, increasing mission success rates by 50%.
I built software and communication architecture on embedded Linux to interface with new sensors, optimize data flow across modules, and improve synchronization between multi-robot systems, expanding device and drone capabilities.
Additionally, I created sensor integration and testing routines, focusing on controller tuning, functionality validation, and safety protocols to enhance product capabilities based on customer feedback.
Tech Stack: C++, Rust, Python, ROS, Gazebo, Git, AWS, PX4, Ardupilot, MAVlink, GNSS/INS, OpenCV, Agile, CI/CD.
Master's Project at WPI
2021-2022
Mapping the Unknown: Decentralized Visual SLAM Using UAVs
In this team project, I contributed significantly to enhance the efficiency of mapping unknown environments using decentralized multi-agent systems, with a focus on disaster response and hazardous material handling. My primary role involved facilitating the convergence of robots at predefined locations to share mapping data, enabling real-time updates for first responders on personnel and room layouts.
I also conducted a comparative analysis that demonstrated how employing three robots significantly reduced mapping time compared to a single robot, highlighting the benefits of collaboration in complex scenarios. The overall solution was validated through simulations with TurtleBots in the ROS Gazebo environment, showcasing its effectiveness in real-world applications. This project illustrates the potential of advanced robotics to improve operational efficiency and situational awareness in critical situations.
Tech Stack: C++, Python, ROS, Gazebo, Git.
Image 2 and Image 3 Reference: [1] Gao, Y., Wang, Y., Zhong, X., Yang, T., Wang, M., Xu, Z., Wang, Y., Xu, C., & Gao, F. (2021). Meeting-Merging-Mission: A Multi-robot Coordinate Framework for Large-Scale Communication-Limited Exploration. ArXiv, abs/2109.07764.
Master's Project at WPI
2021
Real-Time Teleoperation of a 6-DOF Robotic Arm Using Vision-Based Hand Tracking in ROS
I developed a contactless teleoperation system for the 6-DOF Franka Emika Panda robotic arm, simulated in ROS Gazebo. The system allows intuitive control by tracking hand movements through a webcam, converting the hand's pose into commands for the robot. This solution is designed for hazardous environments, enabling tasks like "Pick and Place" without the need for traditional controllers. I utilized ROS, computer vision techniques like color thresholding and contour detection, and linear interpolation to map hand movements to the robot's workspace.
Tech Stack: ROS, Gazebo, OpenCV, C++, Git.
Master's Project at WPI
2021
Real-Time 3D Mapping and Localization with Depth Sensing
Developed a real-time 3D mapping and localization system using an Intel RealSense depth camera and advanced SLAM algorithms, including ORB-SLAM. Utilized point cloud data to generate detailed 3D maps, enabling precise spatial awareness in complex environments. Focused on achieving efficient processing to ensure accurate and responsive map updates in real-time, showcasing expertise in computer vision, point cloud processing, and depth-sensing technologies.
Tech Stack: ROS, Gazebo, OpenCV, C++, Git.
Bachelor's Thesis
2019
Vision-based Collision Avoidance System for a UAV
This project aimed to develop a vision-based collision avoidance system for UAVs. I designed a marker-based localization system using an RGB camera to track the UAV's position relative to surrounding obstacles.
By leveraging OpenCV for image processing on a Raspberry Pi, I employed Aruco markers to provide real-time position and orientation data for the quadcopter. This innovative approach enabled precise navigation away from obstacles, enhancing the UAV's operational capabilities and safety. Overall, the project demonstrates how computer vision can significantly boost UAV autonomy and reliability in dynamic environments.
Tech Stack: C++, OpenCV, Aruco marker, Arduopilot, MAVlink.
About
About

I'm Yash. I'm a Robotics Software Engineer with 5 years of experience in Rust and C++ within a Linux development environment focusing on robot autonomy.
I’m passionate about robotic software development, particularly in robot perception and control, as well as sensor integration and fusion. One of my proudest moments was leading the design and development of multiple iterations of Target Arm’s TULAR device, where I focused on enhancing its functionality and expanding its use cases. I thrive in Agile environments and enjoy being the go-to person for tackling complex autonomy challenges. I was also honored to be recognized as a CT Governor’s Innovation Fellow.
When I’m not coding, I love staying active and I'm currently training for a marathon. I also love exploring the latest advancements in automotive technology. From new vehicle models to breakthroughs in AI, I enjoy discovering how these innovations are shaping the future.
I believe in the value of collaboration and innovation, and I’m always eager to use my skills to develop solutions that make a meaningful impact.
Words from My Colleagues
"Yash Shah has been an invaluable member of our team at Target Arm for the past three years, consistently demonstrating exceptional skills and dedication. Yash has become the go-to lead for many of Target Arm’s most challenging problems. He has successfully led a team of robotics engineers and has also solved complex issues independently."

Ryan Bigham
VP/Lead Engineer & Co-Founder
@ Target Arm Inc.
"Yash's positive attitude and eagerness to embrace new ideas are unmatched. He doesn’t just take in different perspectives— he absorbs them rapidly and seamlessly integrates them into his approach, making him a natural leader. I had the privilege of watching him evolve from a promising student into a full-fledged engineer, where he not only led teams but also developed cutting-edge prototypes. He’s a rare talent that any organization would be lucky to have."
Chairman, CEO & Founder @ Target Arm Inc.
"I had the opportunity of working with Yash as part of numerous projects/competitions. During our time of working together, Yash has been my go to guy for developing algorithms and automation projects."

Hariharan Mohan
Supply Chain and Business Analytics @ Analog Devices
"Yash Shah is a creative and dedicated roboticist. During his B.Tech. he had worked on obstacle avoiding drone and after that as a research assistant he worked on biomimetic robotics."

Ganesh Thangaraj P.
Associate Professor @ Shiv Nadar University
"I had the chance to collaborate with Yash several times for multiple academic projects. Yash makes sure that his peers are not left behind and focuses on sharing his knowledge with others. This reason, among others, makes him a great team player."
Vansh Anand
Management Consultant @PwC
"Yash Shah has been an invaluable member of our team at Target Arm for the past three years, consistently demonstrating exceptional skills and dedication. Yash has become the go-to lead for many of Target Arm’s most challenging problems. He has successfully led a team of robotics engineers and has also solved complex issues independently."
Ryan Bigham
VP/Lead Engineer & Co-Founder
@ Target Arm Inc.
"Yash's positive attitude and eagerness to embrace new ideas are unmatched. He doesn’t just take in different perspectives— he absorbs them rapidly and seamlessly integrates them into his approach, making him a natural leader. I had the privilege of watching him evolve from a promising student into a full-fledged engineer, where he not only led teams but also developed cutting-edge prototypes. He’s a rare talent that any organization would be lucky to have."
Chairman, CEO & Founder @ Target Arm Inc.
"I had the opportunity of working with Yash as part of numerous projects/competitions. During our time of working together, Yash has been my go to guy for developing algorithms and automation projects."
Hariharan Mohan
Supply Chain and Business Analytics @ Analog Devices
"Yash Shah is a creative and dedicated roboticist. During his B.Tech. he had worked on obstacle avoiding drone and after that as a research assistant he worked on biomimetic robotics."
Ganesh Thangaraj P.
Associate Professor @ Shiv Nadar University
"I had the chance to collaborate with Yash several times for multiple academic projects. Yash makes sure that his peers are not left behind and focuses on sharing his knowledge with others. This reason, among others, makes him a great team player."
Vansh Anand
Management Consultant @PwC
Words from My Colleagues
"Yash Shah has been an invaluable member of our team at Target Arm for the past three years, consistently demonstrating exceptional skills and dedication. Yash has become the go-to lead for many of Target Arm’s most challenging problems. He has successfully led a team of robotics engineers and has also solved complex issues independently."
Ryan Bigham
VP/Lead Engineer & Co-Founder
@ Target Arm Inc.
"Yash's positive attitude and eagerness to embrace new ideas are unmatched. He doesn’t just take in different perspectives— he absorbs them rapidly and seamlessly integrates them into his approach, making him a natural leader. I had the privilege of watching him evolve from a promising student into a full-fledged engineer, where he not only led teams but also developed cutting-edge prototypes. He’s a rare talent that any organization would be lucky to have."
Chairman, CEO & Founder @ Target Arm Inc.
"I had the opportunity of working with Yash as part of numerous projects/competitions. During our time of working together, Yash has been my go to guy for developing algorithms and automation projects."
Hariharan Mohan
Supply Chain and Business Analytics @ Analog Devices
"Yash Shah is a creative and dedicated roboticist. During his B.Tech. he had worked on obstacle avoiding drone and after that as a research assistant he worked on biomimetic robotics."
Ganesh Thangaraj P.
Associate Professor @ Shiv Nadar University
"I had the chance to collaborate with Yash several times for multiple academic projects. Yash makes sure that his peers are not left behind and focuses on sharing his knowledge with others. This reason, among others, makes him a great team player."
Vansh Anand
Management Consultant @PwC
Work Experience
Robotics Software Engineer
Target Arm Inc.
June 2022
-
Oct 2024
Robotics and UAV Controls Intern
Target Arm Inc.
Jan 2022
-
May 2022
Innovation Studio Manager
Worcester Polytechnic Institute
May 2021
-
Dec 2021
UAV Technologist (R&D)
AltBird Robotics PLC
Jun 2020
-
Nov 2020
R&D Intern
AltBird Robotics PLC
Mar 2020
-
May 2020
Research Assistant (Robotics)
Shiv Nadar University
Jul 2019
-
Jan 2020
Robotics Summer Intern
TATA Motors
May 2018
-
Jul 2018
Work Experience
Robotics Software Engineer
Target Arm Inc.
June 2022
-
Oct 2024
Robotics and UAV Controls Intern
Target Arm Inc.
Jan 2022
-
May 2022
Innovation Studio Manager
Worcester Polytechnic Institute
May 2021
-
Dec 2021
UAV Technologist (R&D)
AltBird Robotics PLC
Jun 2020
-
Nov 2020
R&D Intern
AltBird Robotics PLC
Mar 2020
-
May 2020
Research Assistant (Robotics)
Shiv Nadar University
Jul 2019
-
Jan 2020
Robotics Summer Intern
TATA Motors
May 2018
-
Jul 2018
Education
Master of Science — Robotics Engineering
Worcester Polytechnic Institute (WPI)
2020
-
2022
Bachelor of Technology — Mechanical Engineering
Shiv Nadar University
2015
-
2019
Education
Master of Science — Robotics Engineering
Worcester Polytechnic Institute (WPI)
2020
-
2022
Bachelor of Technology — Mechanical Engineering
Shiv Nadar University
2015
-
2019
Skills
C/C++
Rust
Python
Linux
Bash
Git
CI/CD
ROS/ROS2
Gazebo
AWS
OpenCV
PyTorch
Simulink
MATLAB
MAVLink
Solidworks
Skills
C/C++
Rust
Python
Linux
Bash
Git
CI/CD
ROS/ROS2
Gazebo
AWS
OpenCV
PyTorch
Simulink
MATLAB
MAVLink
Solidworks