My Role at Target Arm
As a Robotics Software Engineer at Target Arm Inc., I was responsible for the software development, testing, and deployment of multiple iterations of TULAR product. This involved developing navigation and control algorithms, integrating sensor data pipelines, and leading iterative product releases to enhance system functionality. I also led a team of engineers and collaborated with cross-functional stakeholders to align technical solutions with real-world use cases.
Key Responsibilities
Led the software development lifecycle for Target Arm's autonomous launch and recovery device, TULAR.
Worked on enhancing the TULAR drone launch and recovery system by refining software across multiple versions. Prioritized design improvements that ensured software robustness and scalability, driving performance and efficiency gains to meet evolving functional requirements.
Designed tools to streamline testing and deployment, minimizing cycle times and ensuring faster validation of new algorithms on hardware. Built remote diagnostic capabilities to automatically identify and resolve system faults, enhancing the user experience and increasing software reliability.
Oversaw the full software development lifecycle, handling code reviews and testing in each sprint to ensure high-quality feature releases. Prioritized issue resolution and maintained a well-organized codebase, supporting the continuous improvement of the platform’s capabilities.
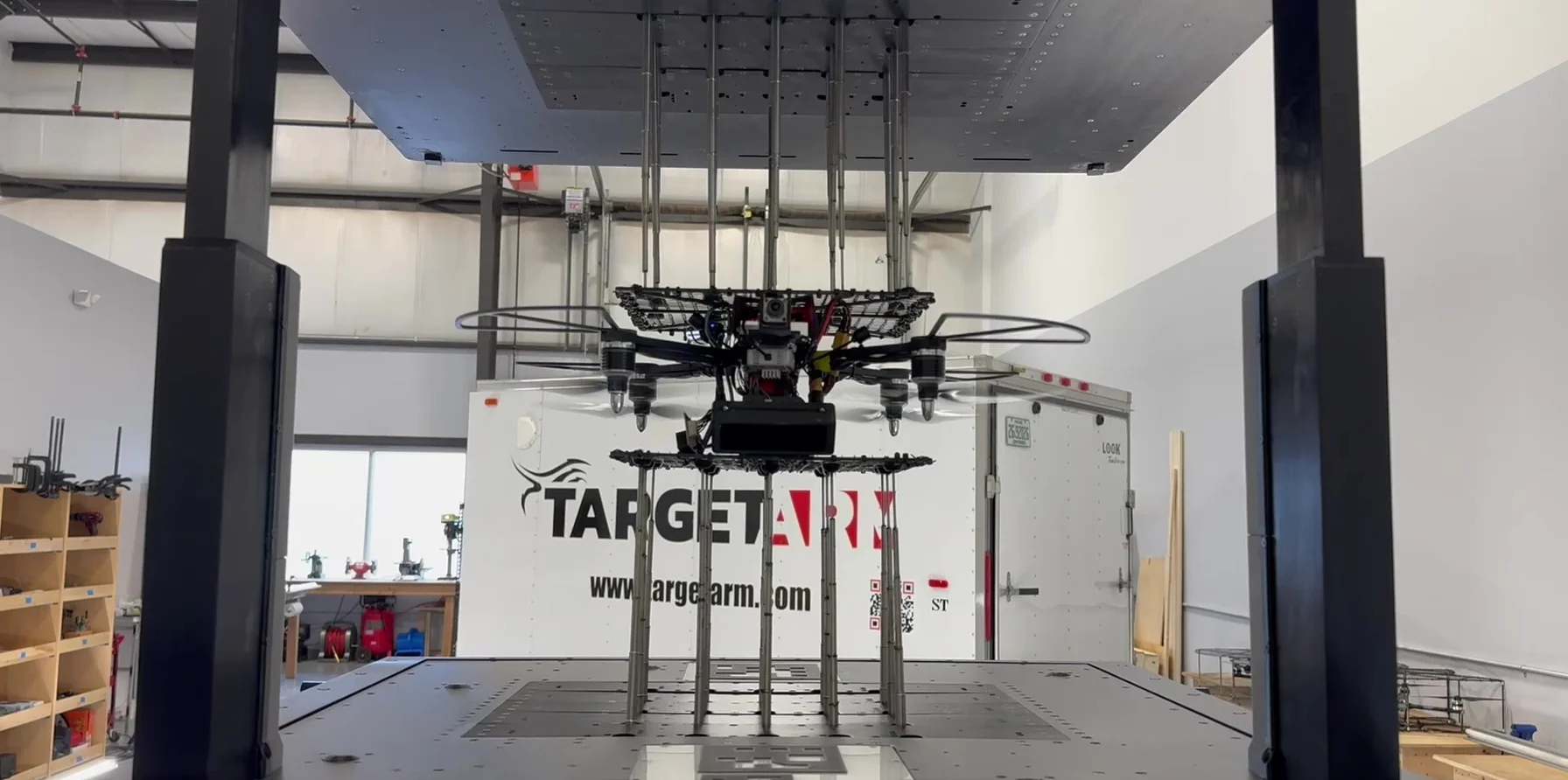
Enhanced the drone’s navigation capabilities by incorporating advanced sensors, enabling precise localization even in challenging conditions. This integration significantly improved the accuracy of the drone’s movements, contributing to a higher success rate in various mission scenarios.
Developed efficient, scalable communication protocols for embedded systems, enabling seamless sensor integration and data handling across multiple devices. This improved synchronization between drones and devices, expanding the range of tasks the system could handle and enhancing its overall functionality.
Developed comprehensive testing routines for sensor integration and controller adjustments, ensuring the safety and functionality of the drone in high-risk environments. Incorporated customer insights to refine the system, adding new drone behaviors that increased mission effectiveness and aligned with user needs.
Impact & Metrics
75% increase in mission success rate: Enhanced navigation and control algorithms for reliable drone operations.
88% reduction in deployment lead times: Developed an AWS-based embedded code deployment pipeline, accelerating the development cycle.
Real-time diagnostics tool: Reduced downtime by streamlining troubleshooting during system testing and flight operations.
Multi-Sensor Integration: Successfully integrated 3+ localization sensors, enhancing system accuracy and stability across diverse use cases.
Competitively selected for the CTNext Governor's Innovation Fellowship Program which recognizes high-achieving recent graduates working at top innovative companies in Connecticut. The fellowship aims to foster professional growth while contributing to the state's innovation ecosystem.
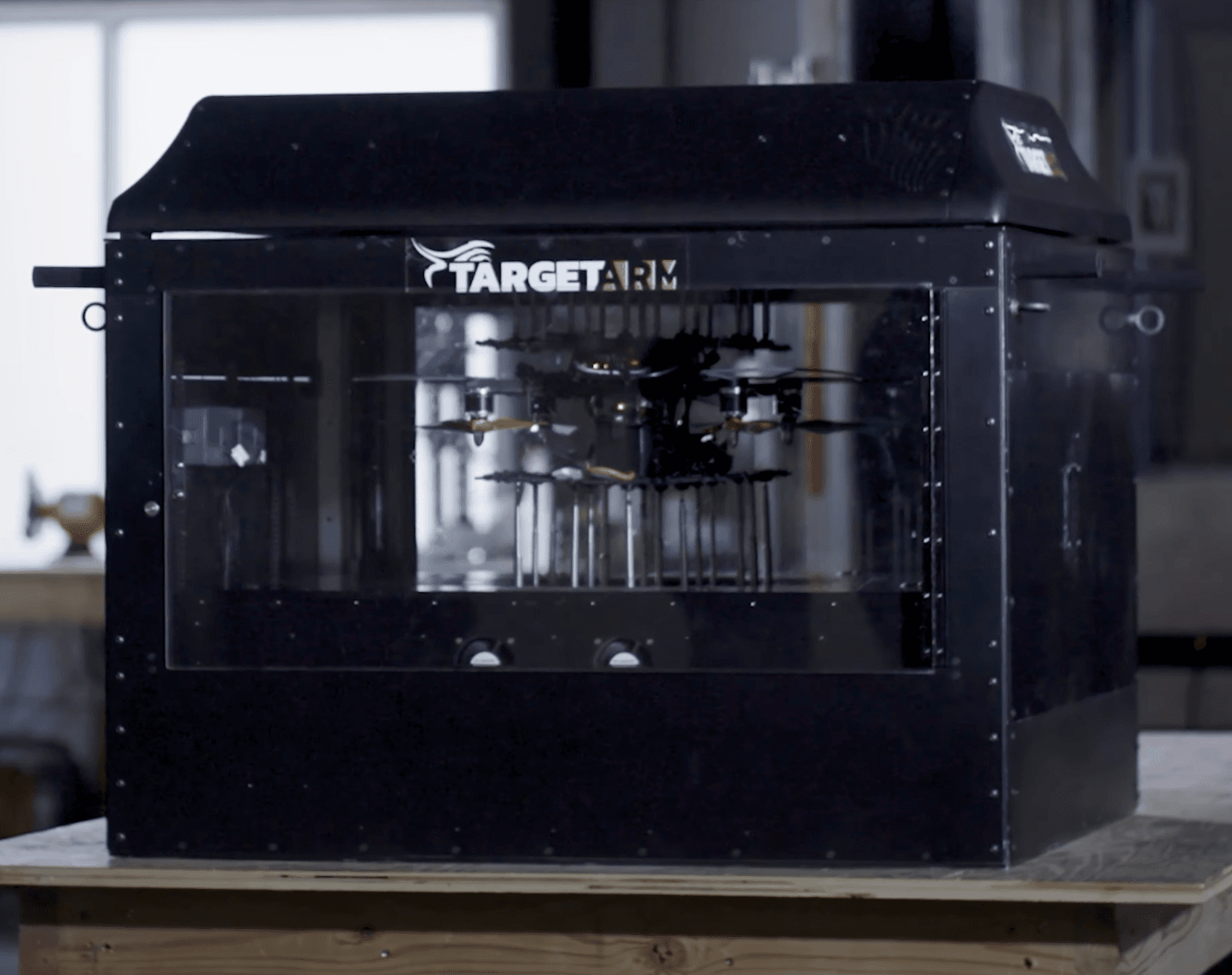
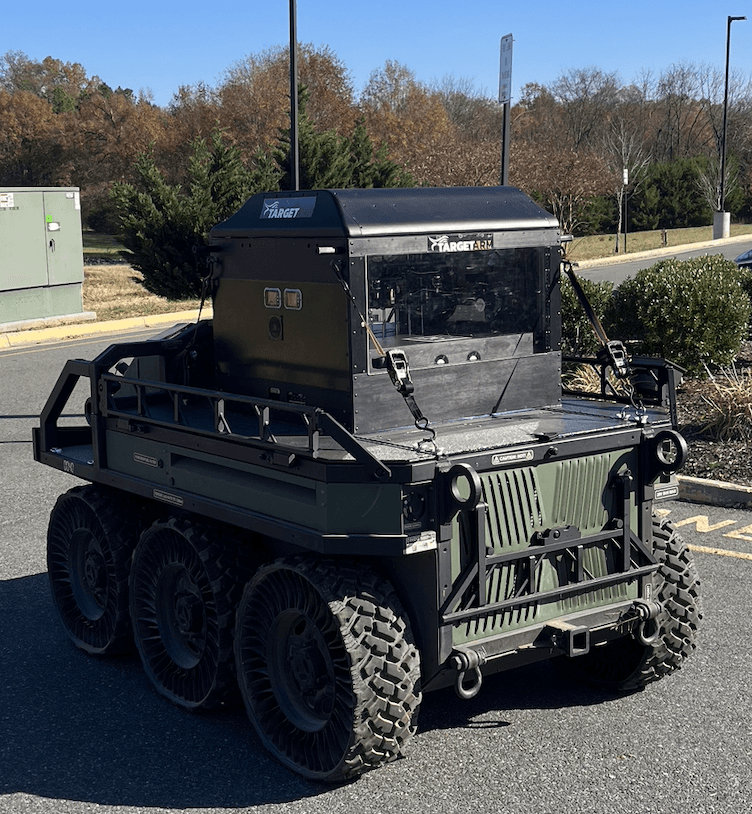
About Target Arm
Target Arm Inc. is a Connecticut-based startup that revolutionizes autonomous drone operations with its patented TULAR device. TULAR enables the launch and recovery of rotary and fixed-wing drones from moving vehicles—such as trucks, planes, and ships—for use in both military and commercial sectors. The device operates in challenging conditions, including high speeds and windy environments, providing mission-critical functionality for industries like package delivery, public safety, oil and gas to name a few.
Video and Image Courtesy: Target Arm Inc.